Task 1
Estimate drag and momentum
To build the state space model for your system, you will need to estimate the drag and momentum terms for your A and B matrices. Here, we will do this using a step response. Drive the car towards a wall at a constant imput motor speed while logging motor input values and ToF sensor output.
First I choose my step response from 0 to 200 PWM (maximum PWM in Lab 5 : PID controller) at 0.5s. The corresponding figure is shown below: (the unit of x-axis is 0.2s, means that when x is 10, the actual time is 10*0.2 = 2s)
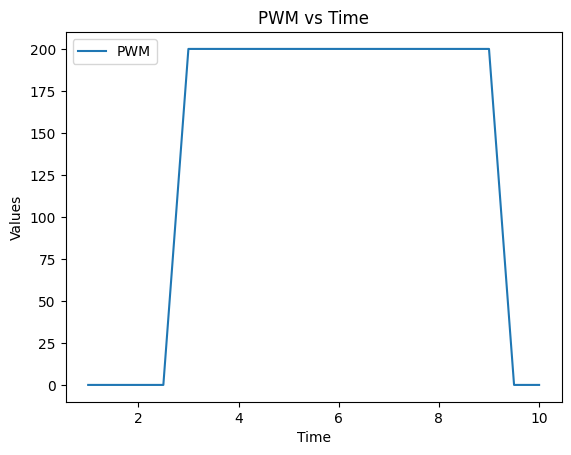
As you can see, the PWM start to rise at about 2.5*0.2 = 0.5s
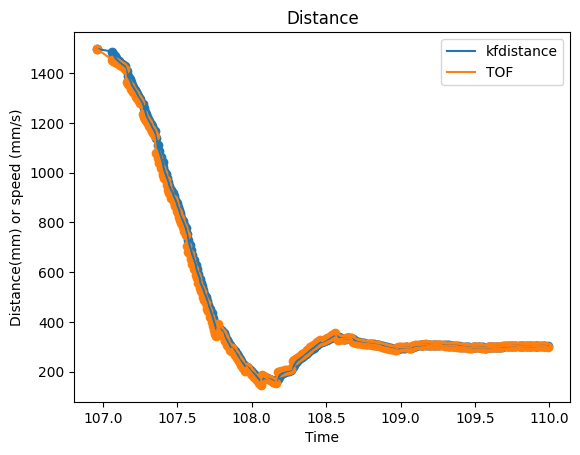
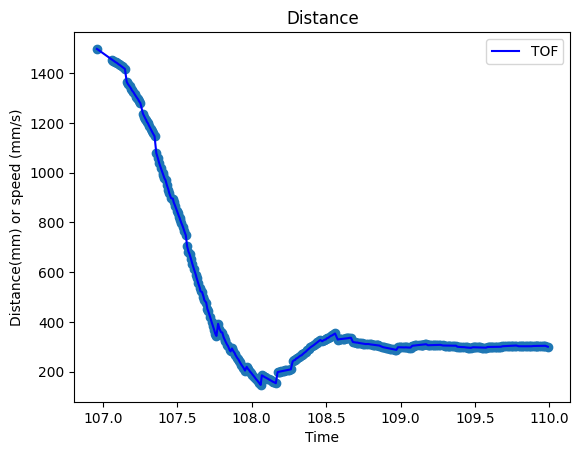
Then I get the data sending from the car, and ploted the distance from TOF sensor as below:(the unit of x-axis is 0.2s, means that when x is 10, the actual time is 10*0.2 = 2s)
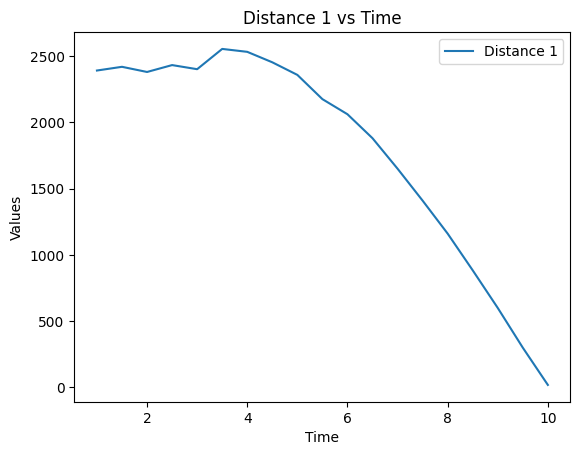
As shown in the figure above, the car is driving towards to the wall and get the steady speed after 6*0.2 = 1.2s.
To have a more direct spot on whether the car reaches a steady speed, I plotted the figure that Speed vs. Time: (the unit of x-axis is 0.2s, means that when x is 10, the actual time is 10*0.2 = 2s)
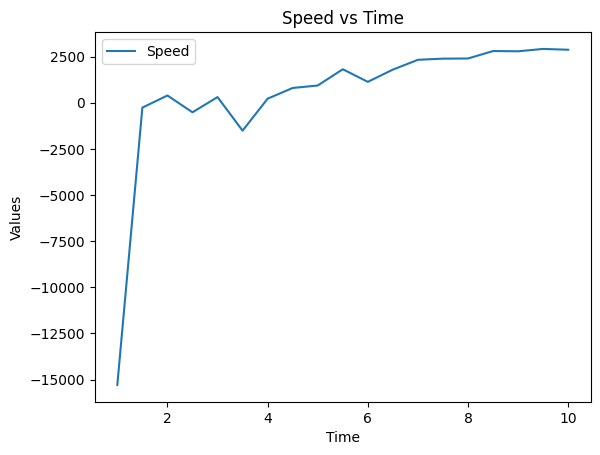
From the figure of the speed, we could know the car reaches the steady speed after 8*0.2 = 1.6 seconds, so I printed out the speed value to get a more precise speed:
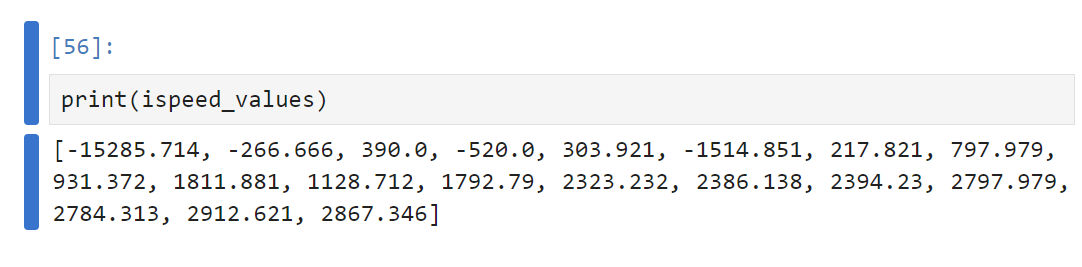
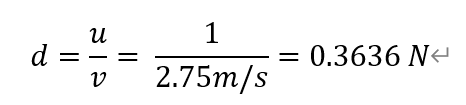
From the data shown above, we finally calculated the steady speed as 2750 mm/s.
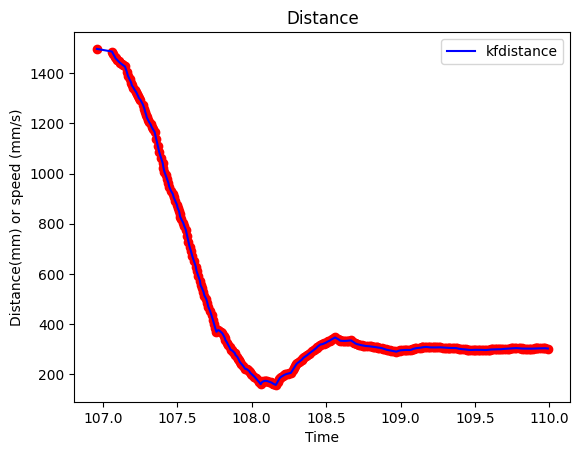
The we calculated the 90% rise time using the figure below:
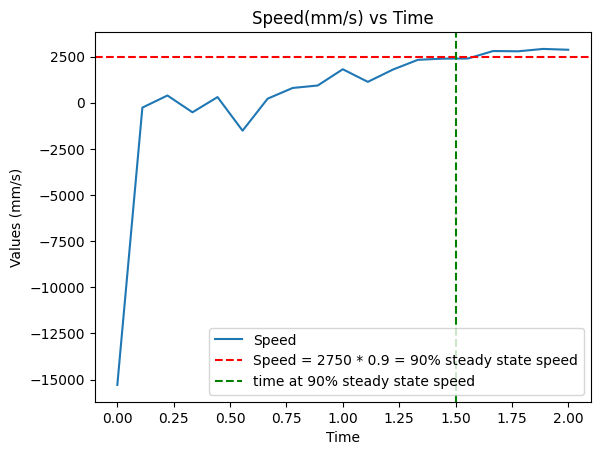
The figure above illustrates that the car reaches the 90% steady speed at 1.5s, so that the overall rise time is 90%_speed_time - start_time = 1.5-0.5 = 1s