Task 1
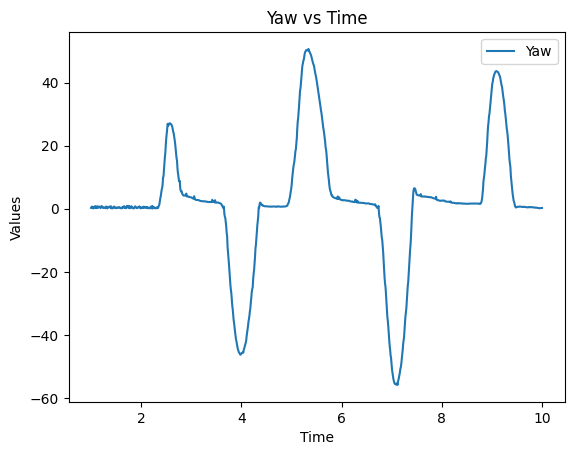
Simply P controller
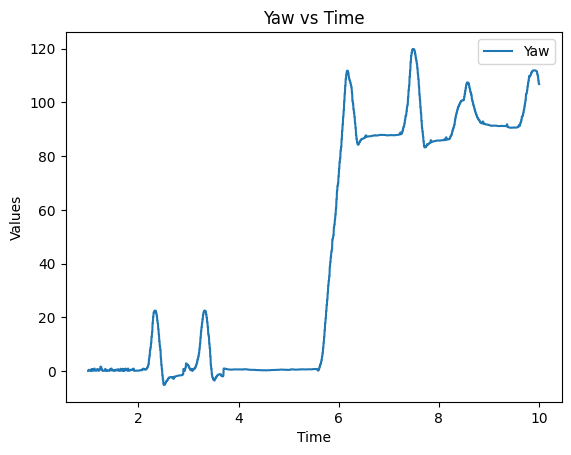
The most basic P controller with kp=10 could make the car turn back to the roughly initial orientation after manually turning the car.
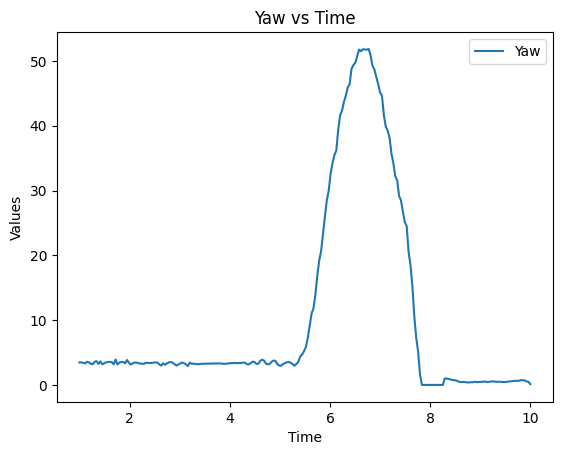
However, there is a noticeable difference between the initial orientation direction and the fianl orientation direction (about 6 degrees).
So, it is necessary for us to implement a integrator to eliminate this difference.