Task 1
Design the PID controller
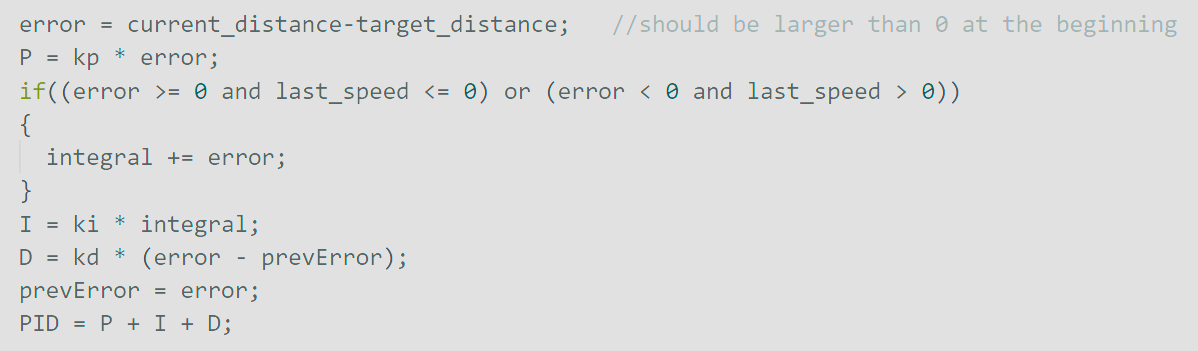
Here below is the code of my PID controller, itself is very simple, but there is a detail:
Because the role of the Integrator is the feedback, so we accumulate the error to the parameter 'integral' only when the current speed and the current error are in the different -/+ regions.
The benefit of this operation is that it makes our car response much more rapidly when it exceeds the limit line (300mm in this task) since the parameter 'Integrator' is always 0 before that. So when the distance is less than 300mm, the parameter 'Integrator' will immidiately be negative and then slow down the speed to make the car brake.