Task 1
Scan the I2C channel to find the sensor
We used the following step to find the TOF sensor
1. Go to File->Examples->Apollo3->Wire and open Example1_wire_I2C
2. Browse through the code to see how to use i2c commands.
3. Run the code
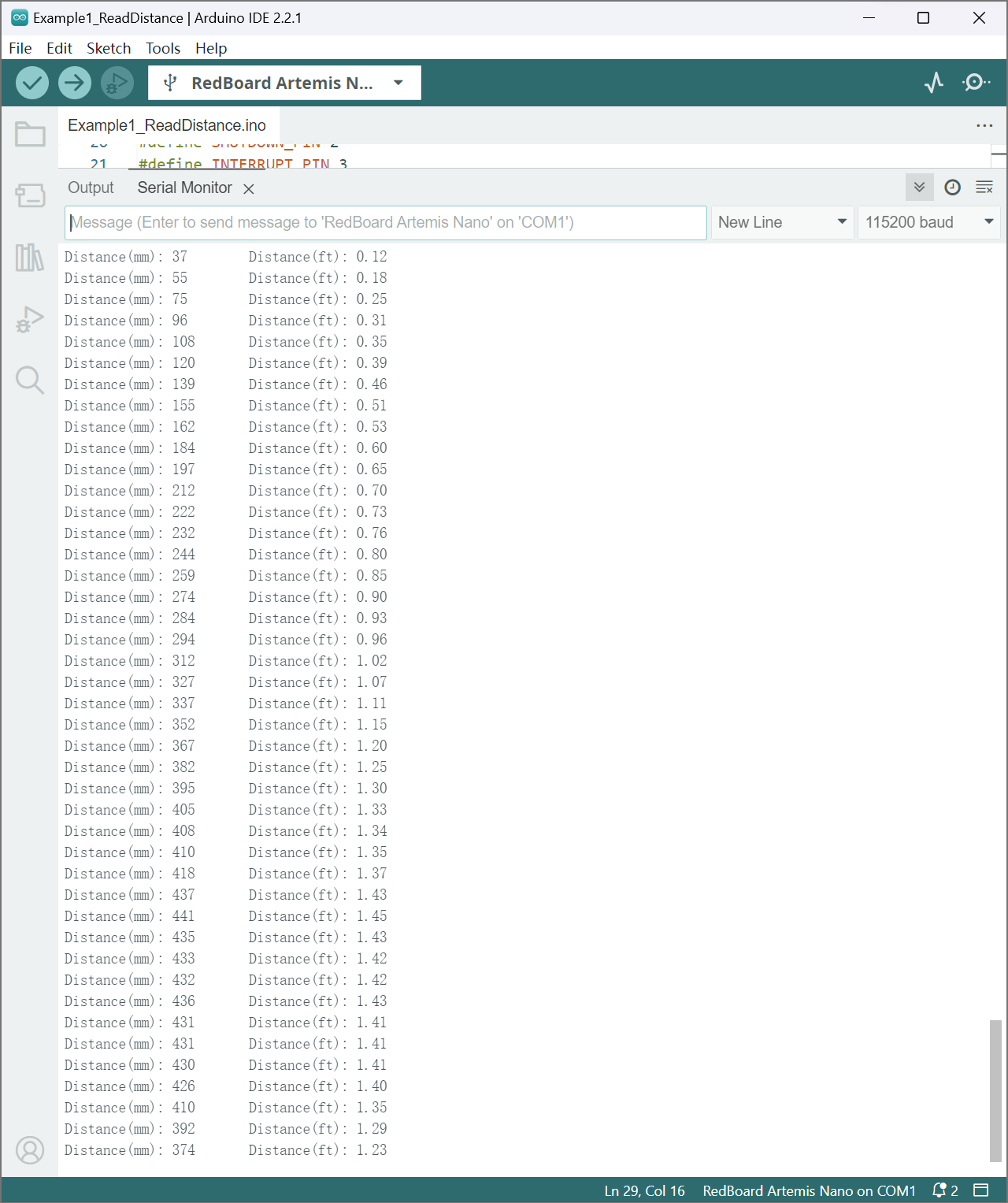
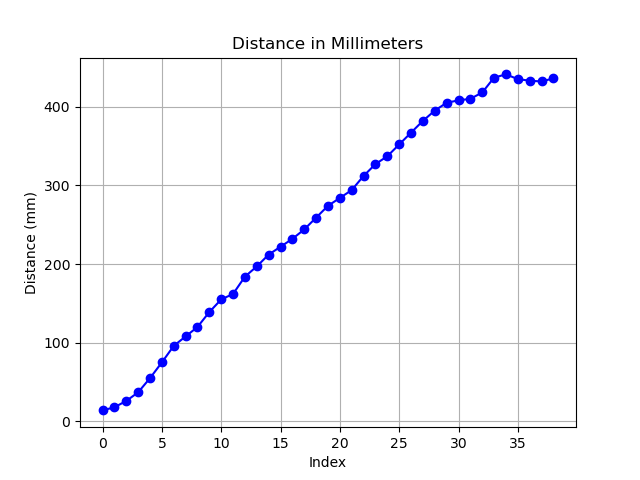
And here below is the result:
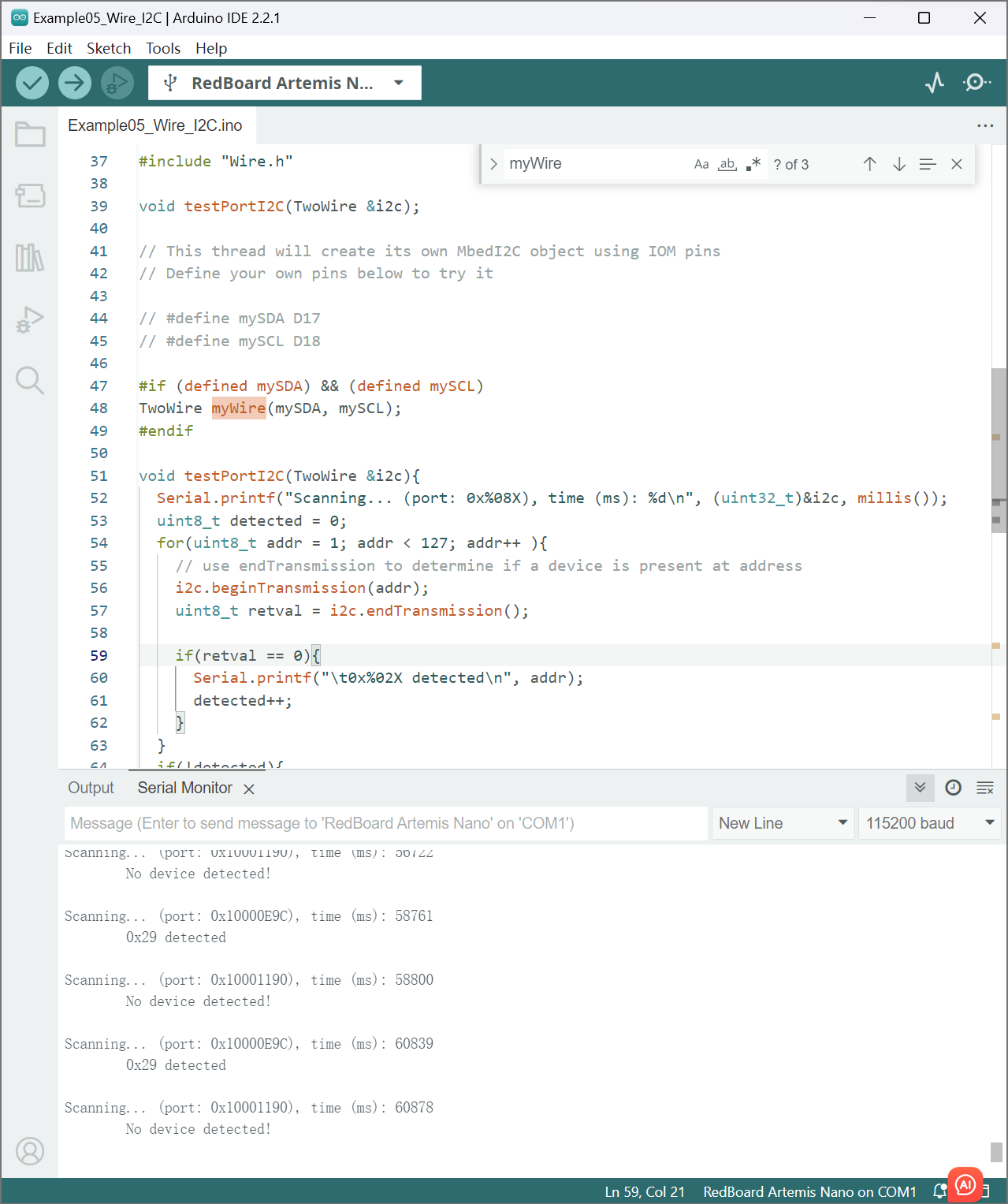
From the serial monitor we could notic that some times the TOP with adress 0x29 is detected and sometimes it was not detected. This is normal to the TOF sensor, which also means that we successfully find the sensor.