Task 2
Show the output at {-90, 0, 90} degrees pitch and roll. Hint: You can use the surface and edges of your table as guides to ensure 90 degree tilt/roll.
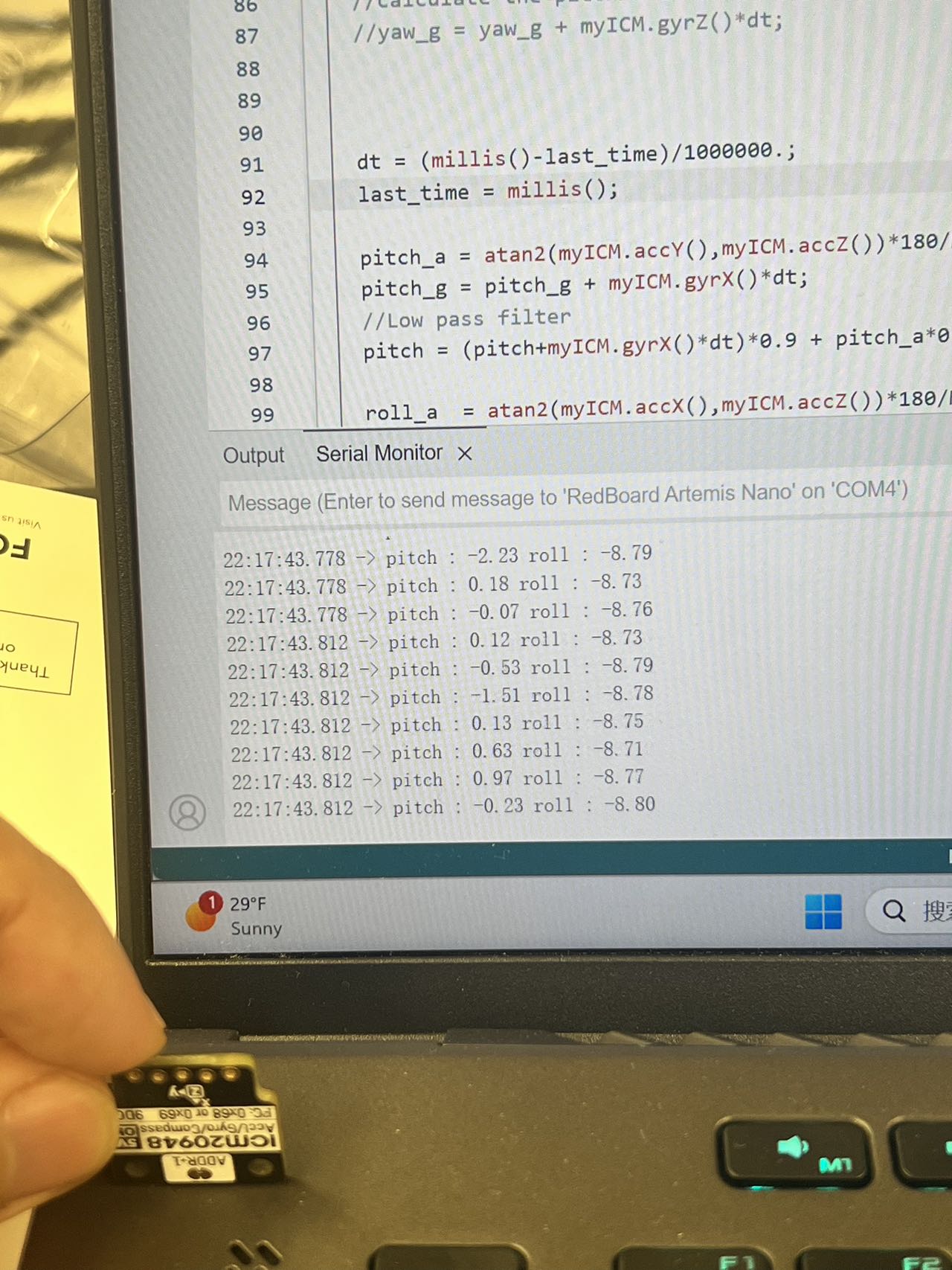
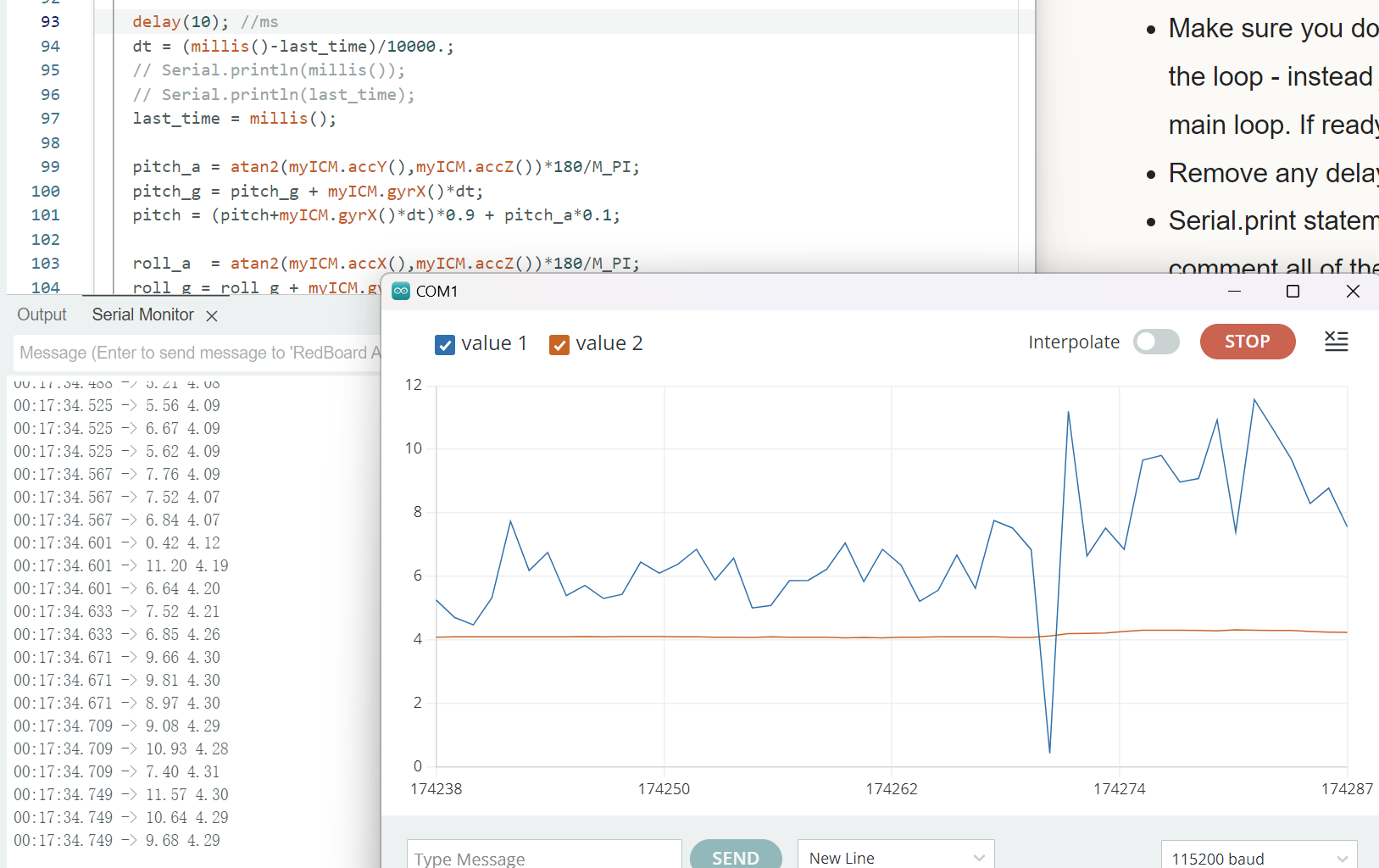
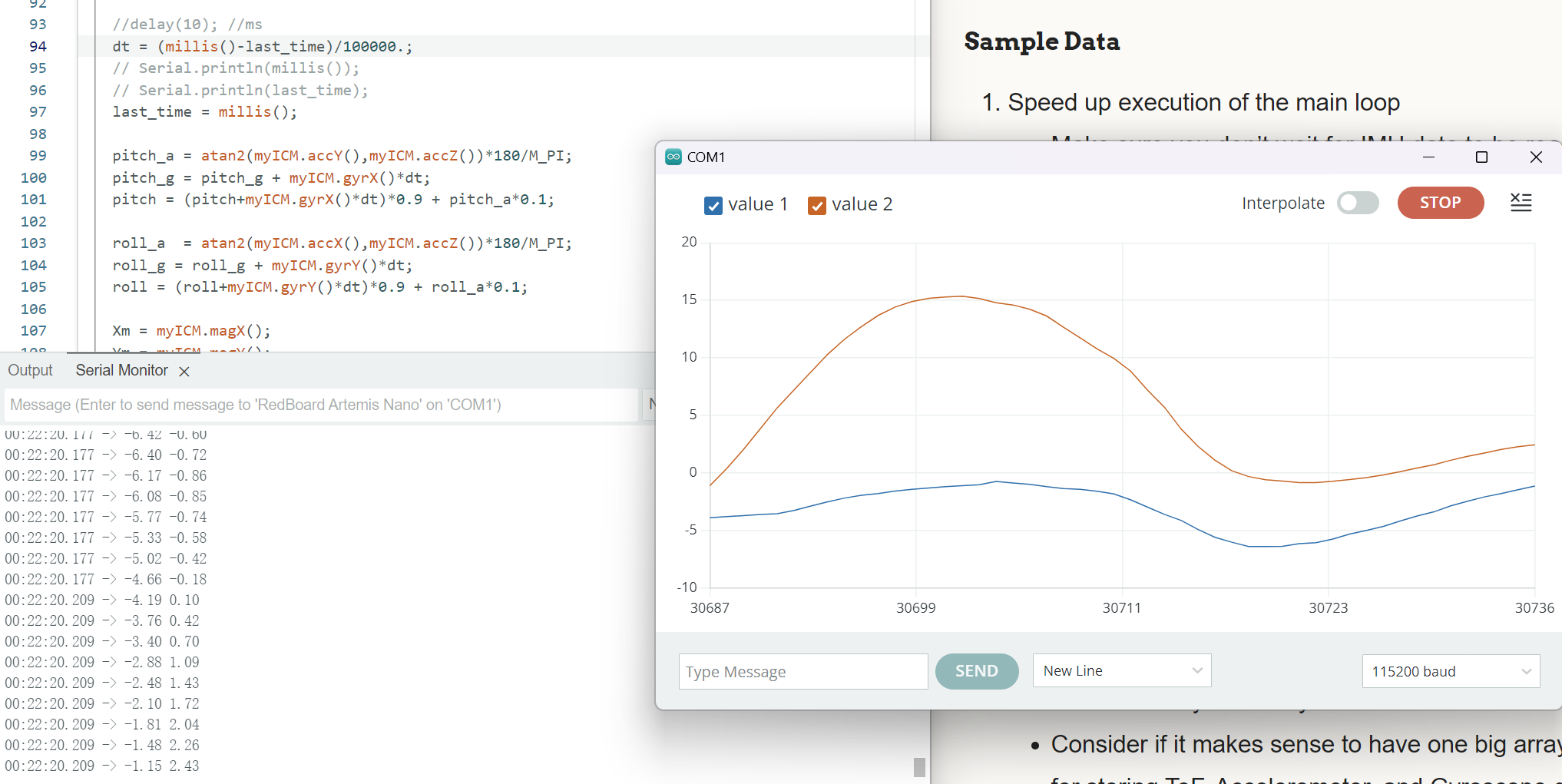
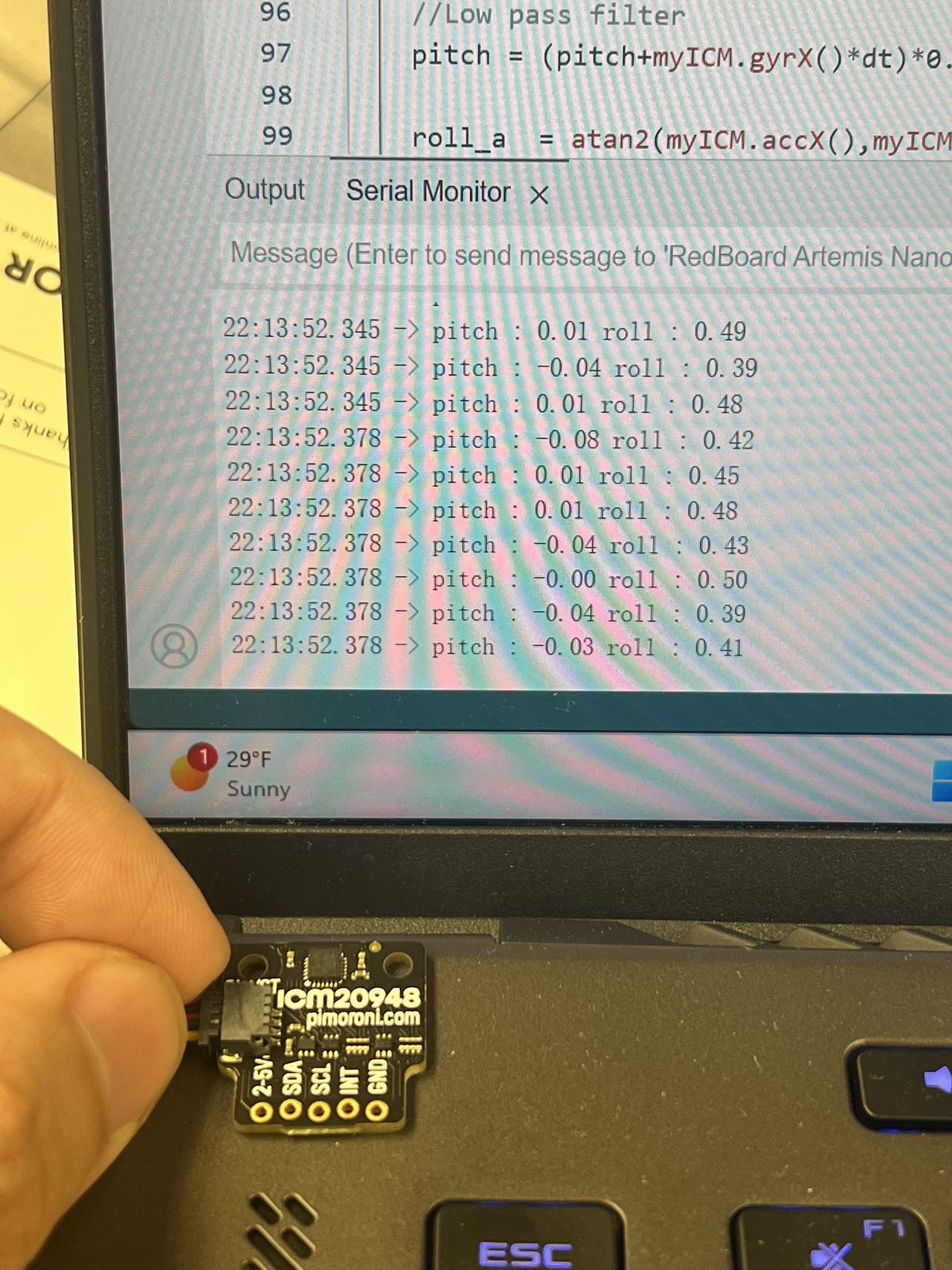
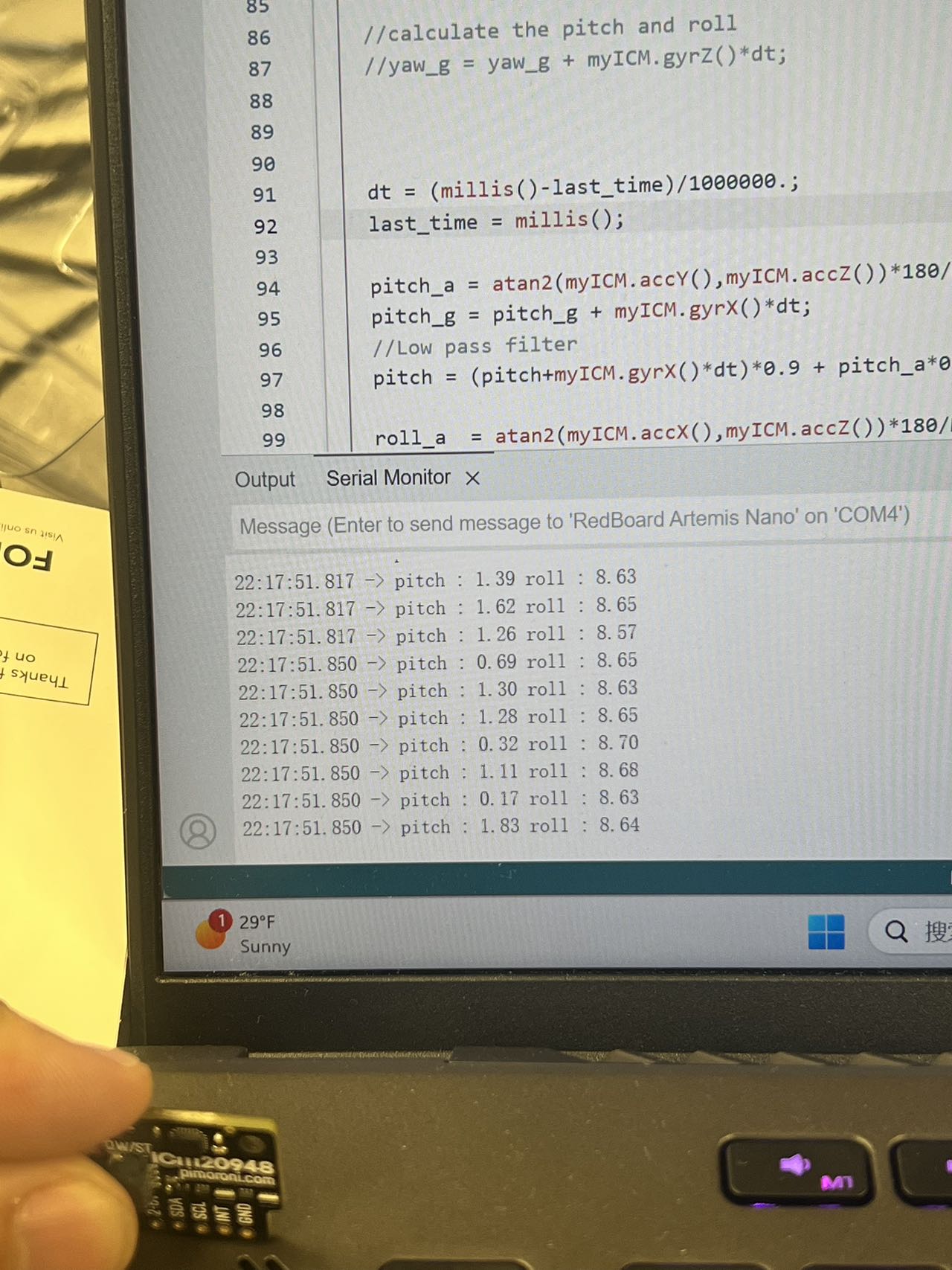
As demonstrated in the figure below, when we make the IMU flat on the table the pitch and roll parameters are all close to zero.
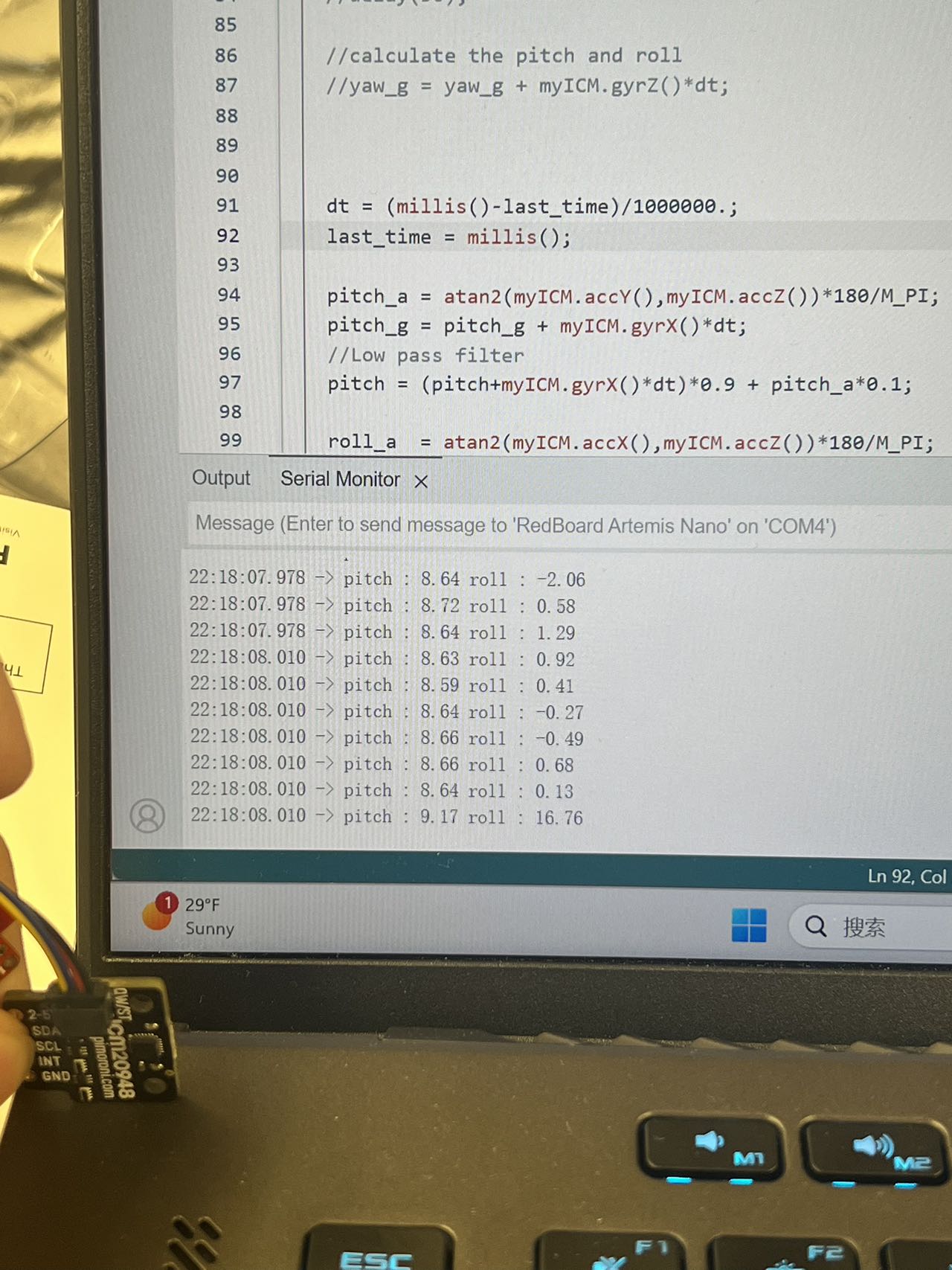
When we turned the IMU along the y-axis for 90 degrees, the pitch data has increased to around 8.6 and the roll data still closed to 0.
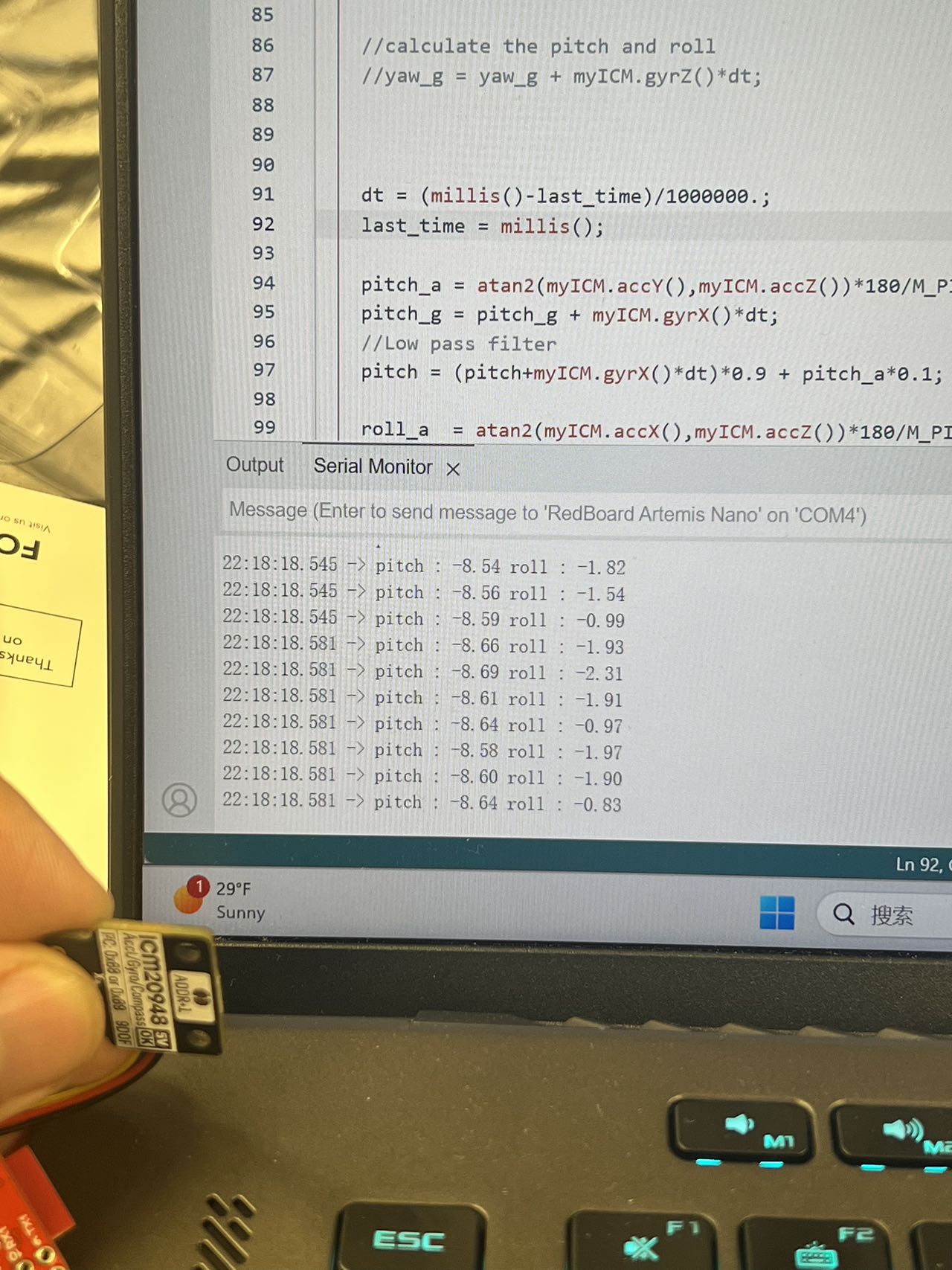
Conversely, if we turned the IMU around the y-axis for negative 90 degrees (shown in the figure below), the pitch parameter turned to around -8.6 with roll still close to 0.
Same for the roll, when we turned the IMU along x-axis for 90 degrees, the roll parameter became close to 8.6 and the pitch kept closed to 0.
And the roll data are around -8.6 after we turned the IMU along the inverse direction.